
Drohnen sind aus der heutigen Welt nicht mehr wegzudenken. Ob im Hobbybereich oder in Logistikunternehmen so sind sie omnipräsent und werden in den kommenden Jahren noch mehr boomen. Beispiel Deutschland:
"Die Marktstudie vom Verband Unbemannter Luftfahrt prognostiziert, dass sich im Jahr 2025 in Deutschland die Nachfrage des kommerziellen Drohnenmarkts auf 1,5 Milliarden Euro belaufen wird und die des privaten Drohnenmarktes auf 95 Millionen Euro.", laut Statista.de.
Einer der globalen Player ist die chinesische Firma DJI. Das 14 Jahre alte Unternehmen hat die Drohnenkategorie dank einer aggressiven Preisstrategie für seine Hardware dominiert. Doch mit der Aufnahme von DJI in die Schwarze Liste des US-Handelsministeriums ändert sich die Ausgangslage grundlegend: Dieser Schritt hindert DJI nicht nur daran, weiterhin US-Komponenten zu beziehen, sondern bedeutet auch, dass jedes Unternehmen, das mit DJI Geschäfte machen möchte (und sei es nur die Verwendung des DJI SDK), nun prüfen muss, ob diese Aktivitäten mit den US-Vorschriften in Einklang stehen. Dies wird zu einem rechtlichen Risiko für das betroffene Unternehmen, genauso wie die Verwendung von Huawei-Hardware, dem chinesischen Unternehmen, das seit 2019 auf der gleichen Liste steht und in den USA so gut wie nicht mehr verwendet wird.
Mittlerweile ist ein Open-Source-Ökosystem daran, sich als Industriestandard im Kampf um Marktanteile durchzusetzen. Seit seiner Gründung im Jahr 2011 hat sich PX4 zum meistgenutzten Open-Source-Flugsteuerungssystem für autonome Flugzeuge entwickelt. Während die Firma Auterion der führende Beitragende ist, wird es von einer externen Community von mehr als 600 Beitragenden genutzt, darunter führende Drohnen- und Luft- und Raumfahrtunternehmen sowie Unternehmen, die sich alle für die Weiterentwicklung der Software und Hardware einsetzen. Gegenüber der bisherigen Software-Steuerungen für Drohnen hat PX4 laut Auterion zwei wesentliche Vorteile:
Einerseits vereinfacht sie das Fliegen von Drohnen massiv und macht es viel sicherer. Andererseits ermöglicht die Software, Drohnen autonom zu starten oder zu landen, sowie eigenständig bestimmten Objekten zu folgen, etwa Fahrradfahrern, Skater oder Surfer während ihrem wilden Ritt.
Entstanden ist die Software durch ein weltweites Entwicklerteam unter Federführung des ETH-Doktoranden Lorenz Meier, Initiant von Pixhawk und Chefentwickler von PX4. In der Programmierung der Software steckten unzählige Mannjahre Arbeit, die eine Einzelperson niemals leisten könne. Man dürfte aber mit gutem Gewissen sagen, dass PX4 wesentlich aus dem Ökosystem der ETH Zürich hervorgegangen sei.
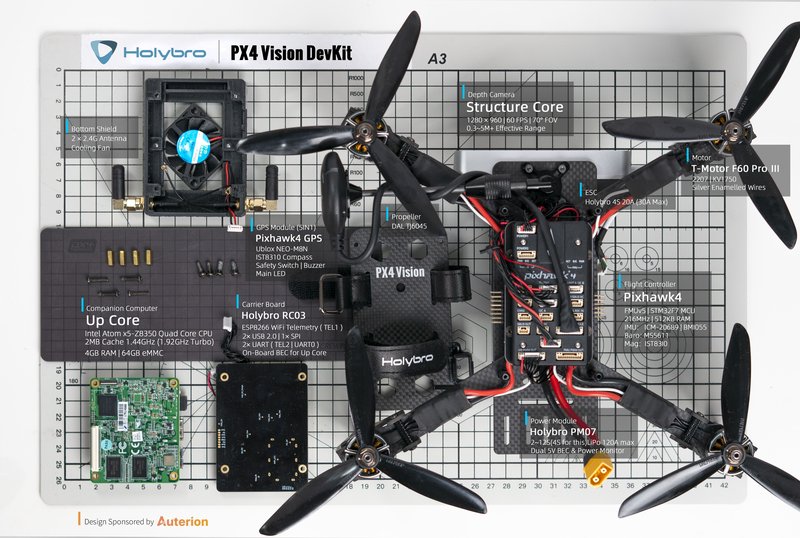
Foto: https://docs.px4.io/master/en/complete_vehicles/px4_vision_kit.html
Quellen: https://auterion.com/dji-alternative-auterion/
https://ethz.ch/de/news-und-veranstaltungen/eth-news/news/2016/01/drohnensteuerung-px4.html


